






Established in 2001, it is a national high-tech enterprise that integrates research and development, production, sales, and after-sales service.
SEARCH WHAT YOU WANT
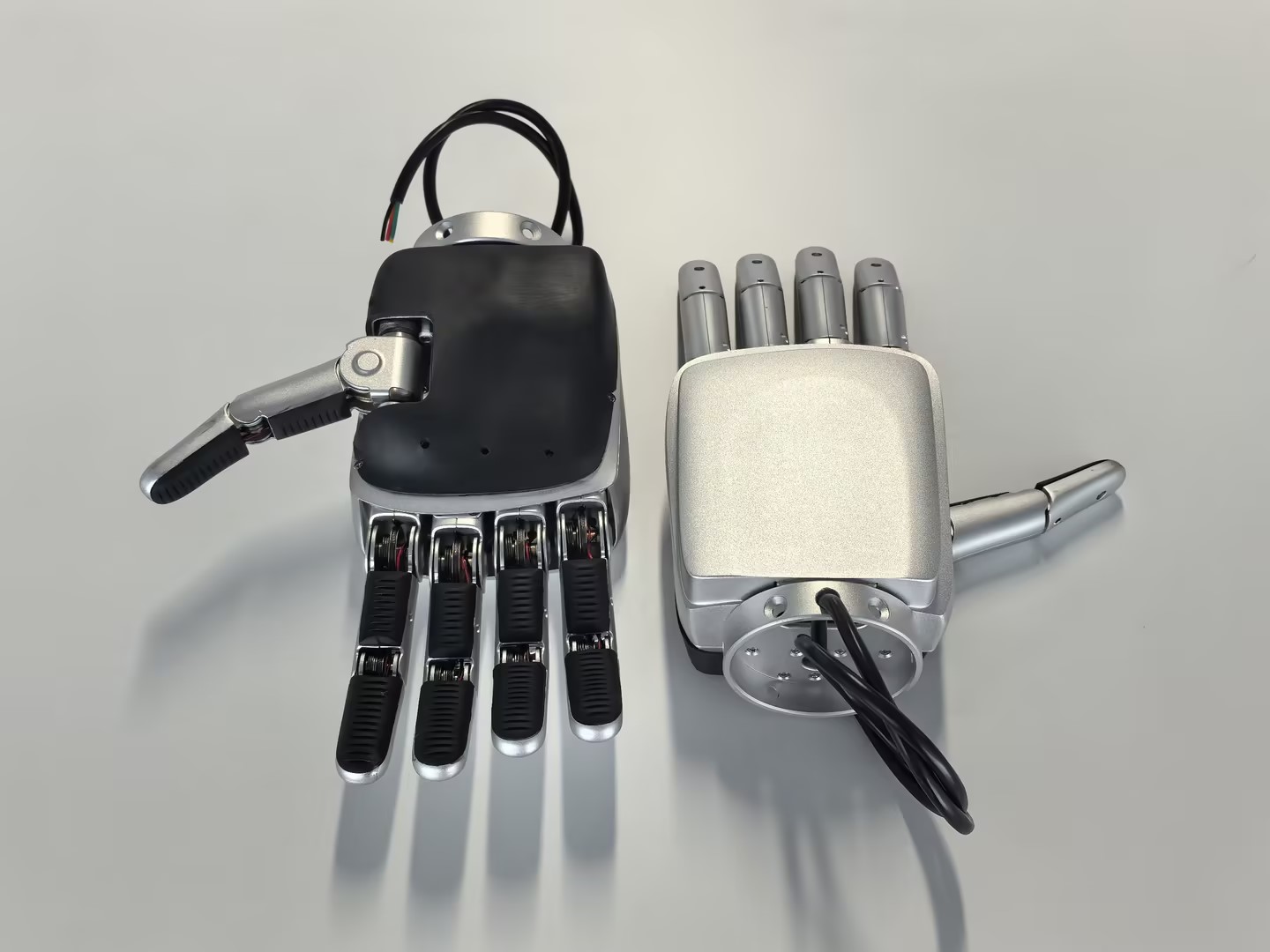
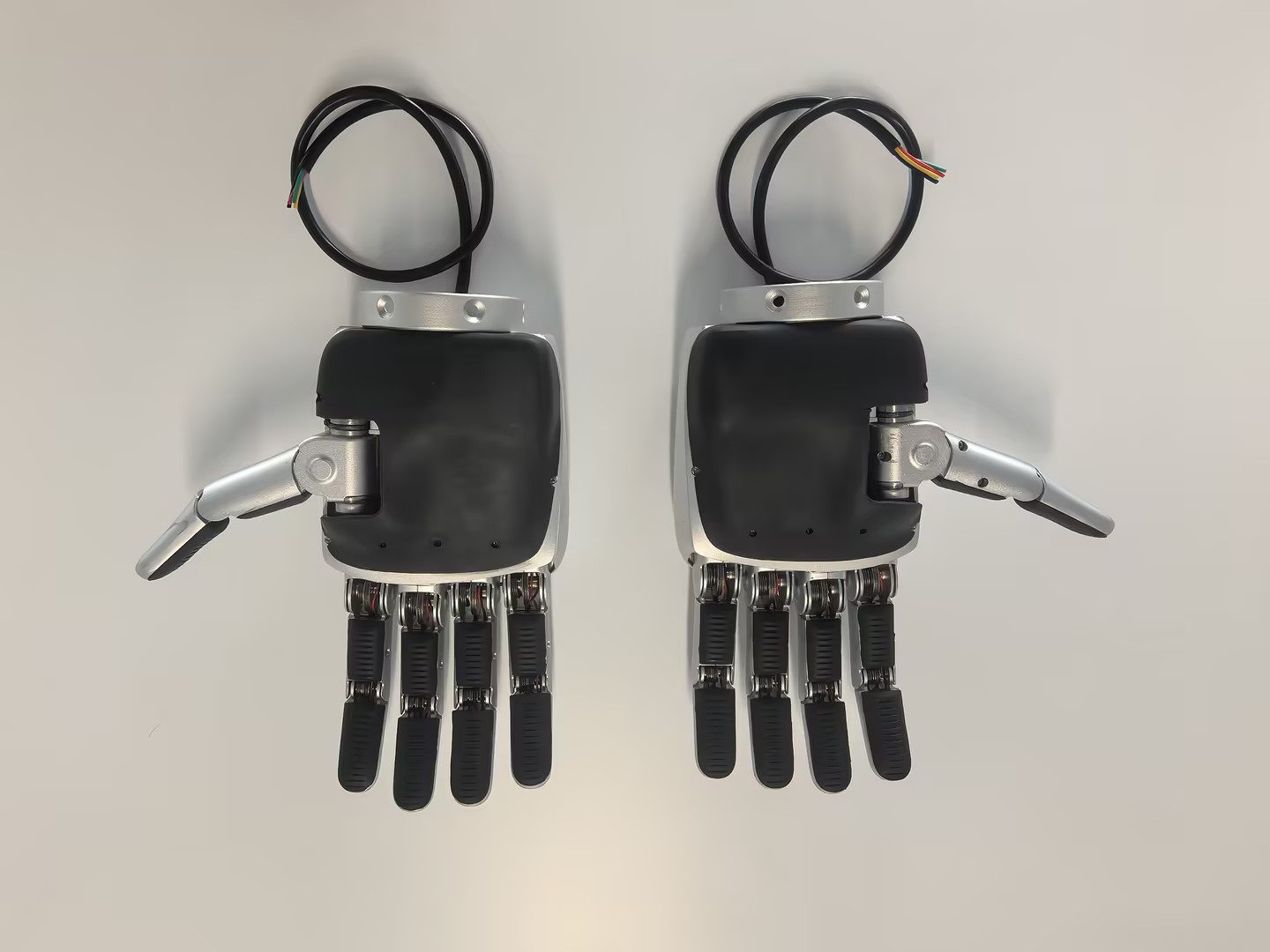
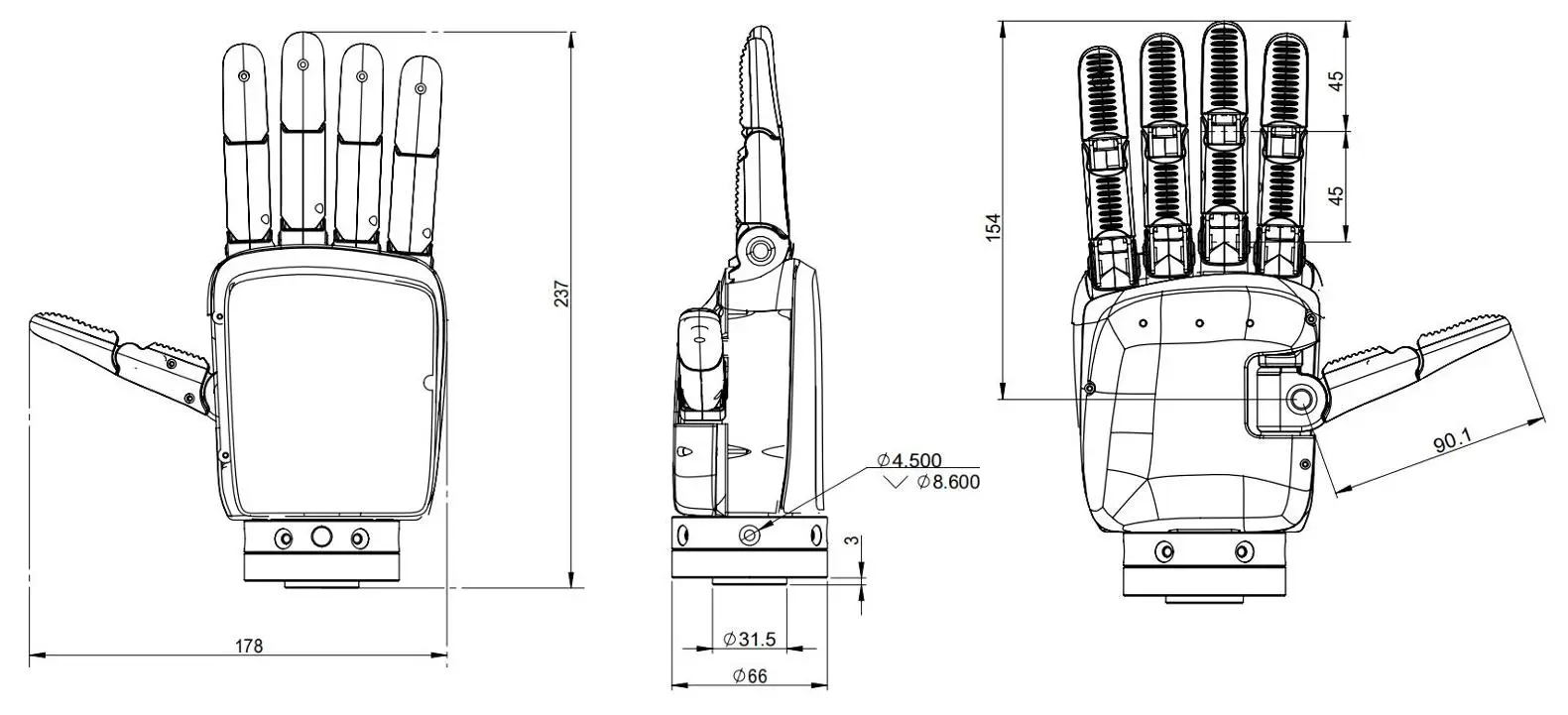
| LZ001 Industrial Dexterous Hand | |||
| Data Index | |||
| Number Of Fingers | 5 | Cycle Life | 1 Million Cycles |
| Degree Of Freedom | 11 | Finger pressure sensor | Ten |
| Number Of Drives | 6 | Cable-Driven | |
| Joint Impact Resistance | Support | Operating Voltage | DC48V±l0% |
| Net Weight | 1.2kg | Operating Current | 4A |
| Maximum Pinching Force | 10kg | Control Interface | Modbus485/EtherCAT |
| LZ002 Industrial Dexterous Hand | |||
| Data Index | |||
| Number Of Fingers | 5 | Cycle Life | 1 Million Cycles |
| Degree Of Freedom | 15 | Finger pressure sensor | Five |
| Number Of Drives | 6 | Linkage Drive | |
| Gripping Time | 0.3s | Operating Voltage | DC48V±l0% |
| Net Weight | 500g | Operating Current | 2A |
| Maximum Force | 3kg | Control Interface | Modbus485/EtherCAT |
| LZ010 Data Glove | |||
| Data Index | |||
| Number of Flex/Angle Sensors | 10 | Number of IMUs | 6 |
| Angular Resolution | 0.01° | Accelerometer Range | ±18 g |
| Attitude Accuracy | ≤ 0.5° | Interface | USB and Ethernet |
| Communication Latency | ≤ 20 ms | Glove Weight | 100 ± 5 g |
| Seamless Simulation Integration | physics engines such as Mujoco and Isaac Lab | Development Kit (SDK) for custom development. | |
| Data Export | Provides plugin interfaces and APIs for third-party tools including Unity, Unreal Engine (UE), and MotionBuilder. | Data Playback | The software supports data playback, query, and save functions. It supports standard motion data formats including BVH and FBX, and provides a Software |
Established in 2001, it is a national high-tech enterprise that integrates research and development, production, sales, and after-sales service.
Powered by iglobalwin.com